Interruttore di finecorsa a pistone con perno sigillato

-

Alloggiamento robusto
-

Azione affidabile
-

Vita migliorata
Descrizione del prodotto
Gli interruttori di finecorsa miniaturizzati della serie RL8 di Renew offrono maggiore durata e resistenza agli ambienti difficili, con una vita meccanica fino a 10 milioni di operazioni, rendendoli adatti a ruoli critici e gravosi in cui i normali interruttori di base non potrebbero essere utilizzati. Questi interruttori presentano un design con alloggiamento diviso, costituito da un corpo in lega di zinco pressofuso e da una copertura in materiale termoplastico. La copertura è rimovibile per un facile accesso e una facile installazione. Il design compatto consente l'utilizzo degli interruttori di finecorsa in applicazioni in cui lo spazio di montaggio è limitato.
Dimensioni e caratteristiche operative
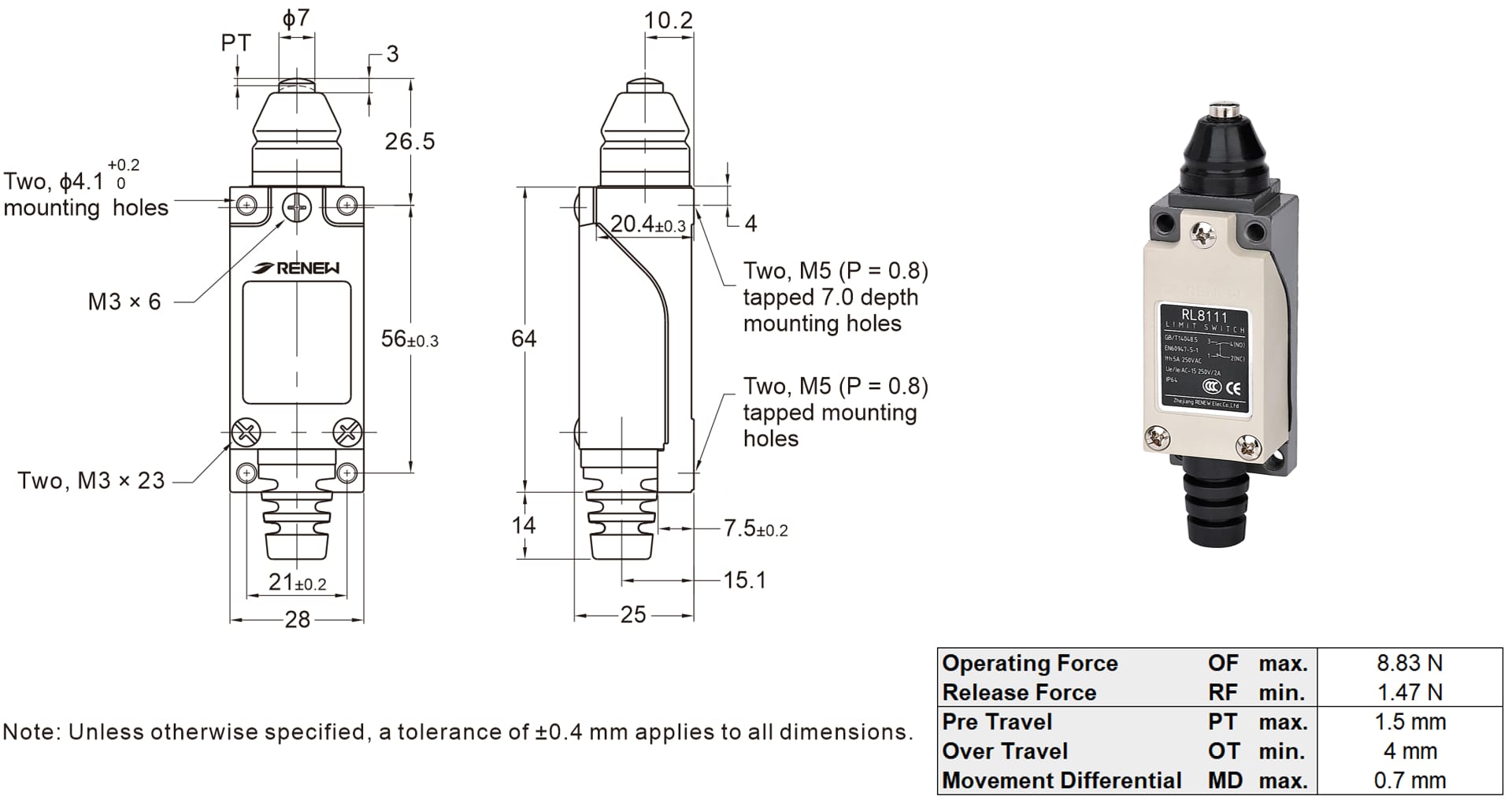
Dati tecnici generali
| Valutazione dell'ampere | 5 A, 250 V CA |
| Resistenza di isolamento | 100 MΩ min. (a 500 VDC) |
| Resistenza di contatto | 25 mΩ max. (valore iniziale) |
| Rigidità dielettrica | Tra contatti della stessa polarità 1.000 V CA, 50/60 Hz per 1 min |
| Tra parti metalliche sottoposte a corrente e terra e tra ciascun terminale e parti metalliche non sottoposte a corrente 2.000 V CA, 50/60 Hz per 1 min | |
| Resistenza alle vibrazioni per malfunzionamento | Da 10 a 55 Hz, ampiezza doppia 1,5 mm (malfunzionamento: 1 ms max.) |
| vita meccanica | 10.000.000 di operazioni min. (120 operazioni/min) |
| Vita elettrica | 300.000 operazioni min. (sotto il carico di resistenza nominale) |
| Grado di protezione | Uso generale: IP64 |
Applicazione
I finecorsa miniaturizzati di Renew svolgono un ruolo fondamentale nel garantire la sicurezza, la precisione e l'affidabilità di vari dispositivi in diversi settori. Ecco alcune applicazioni comuni o potenziali.
Robotica e linee di assemblaggio automatizzate
In robotica, questi interruttori vengono utilizzati per determinare la posizione dei bracci robotici. Ad esempio, un finecorsa a stantuffo sigillato può rilevare quando un braccio robotico raggiunge il suo finecorsa, inviando un segnale al sistema di controllo per arrestare il movimento o invertire la direzione, garantendo un controllo preciso ed evitando danni meccanici.
Categorie di prodotti
-

Interruttore di base con leva a cerniera corta
-

Interruttore di base con leva a rullo con cerniera corta
-

Contatto mantenuto / Pistone per montaggio a pannello / Tand...
-

Interruttore di base a leva a cerniera
-

Interruttore di base in miniatura con pistoncino a perno
-

Interruttore di finecorsa oscillante con bobina a punta in plastica







